
A evolução do Centro de Informações de Combate nos navios de guerra – parte 2

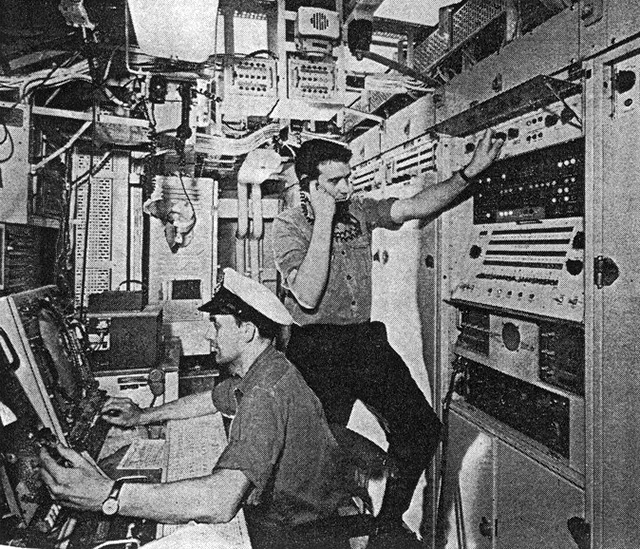
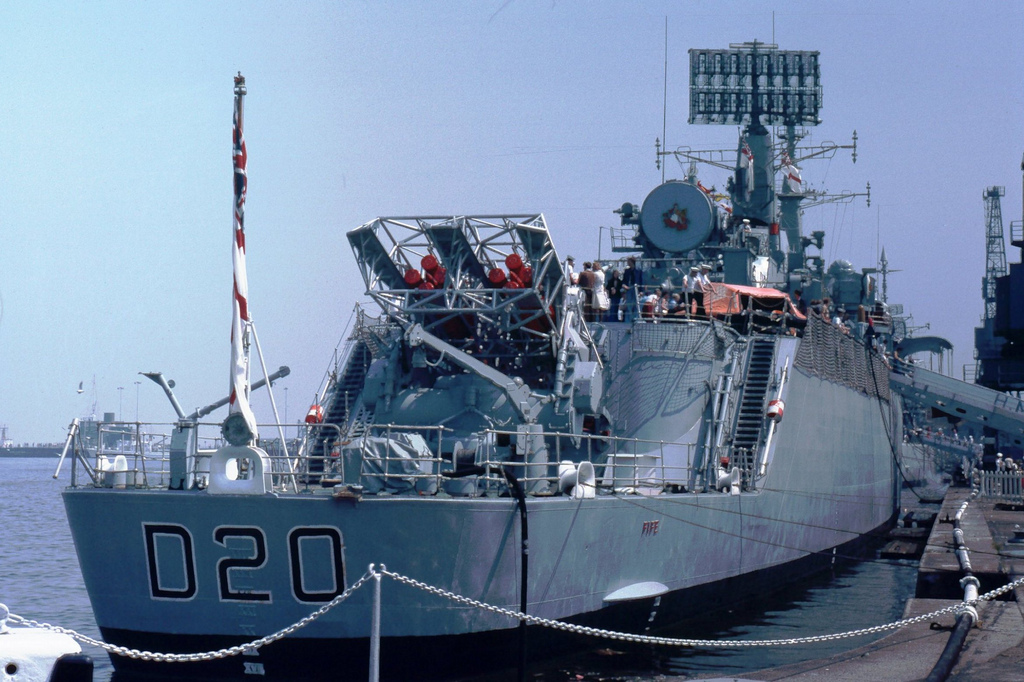
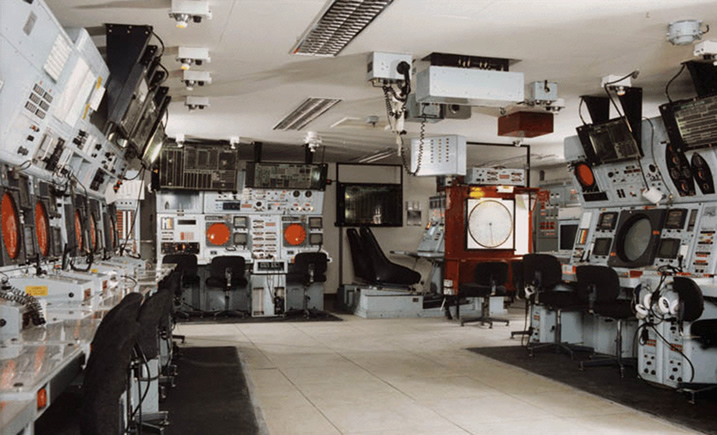
Centro de Operações de Combate de um destróier Type 42
O desenvolvimento dos sistemas ADA, ADAWS e CAAIS da Royal Navy
Já em 1944, a Royal Navy reconheceu que era necessária uma organização especial dentro de um navio para lidar com dados de ação e como resultado, a Organização de Informação de Ação (Action Information Organization – AIO) foi criada. As ferramentas da arte eram principalmente sensores humanos e eletrônicos e armas controladas manualmente.
Durante a década de 1950, o desenvolvimento dos motores a jato e foguete, juntamente com métodos cada vez mais sofisticados de controle de armas, como dispositivos de localização, criaram um requisito para fazer uma melhoria correspondente aos métodos de gerenciamento de dados na AIO. A Royal Navy estava convencida de que a reação rápida era de suma importância no desenvolvimento de sistemas de armas.
Comprehensive Display System (CDS)
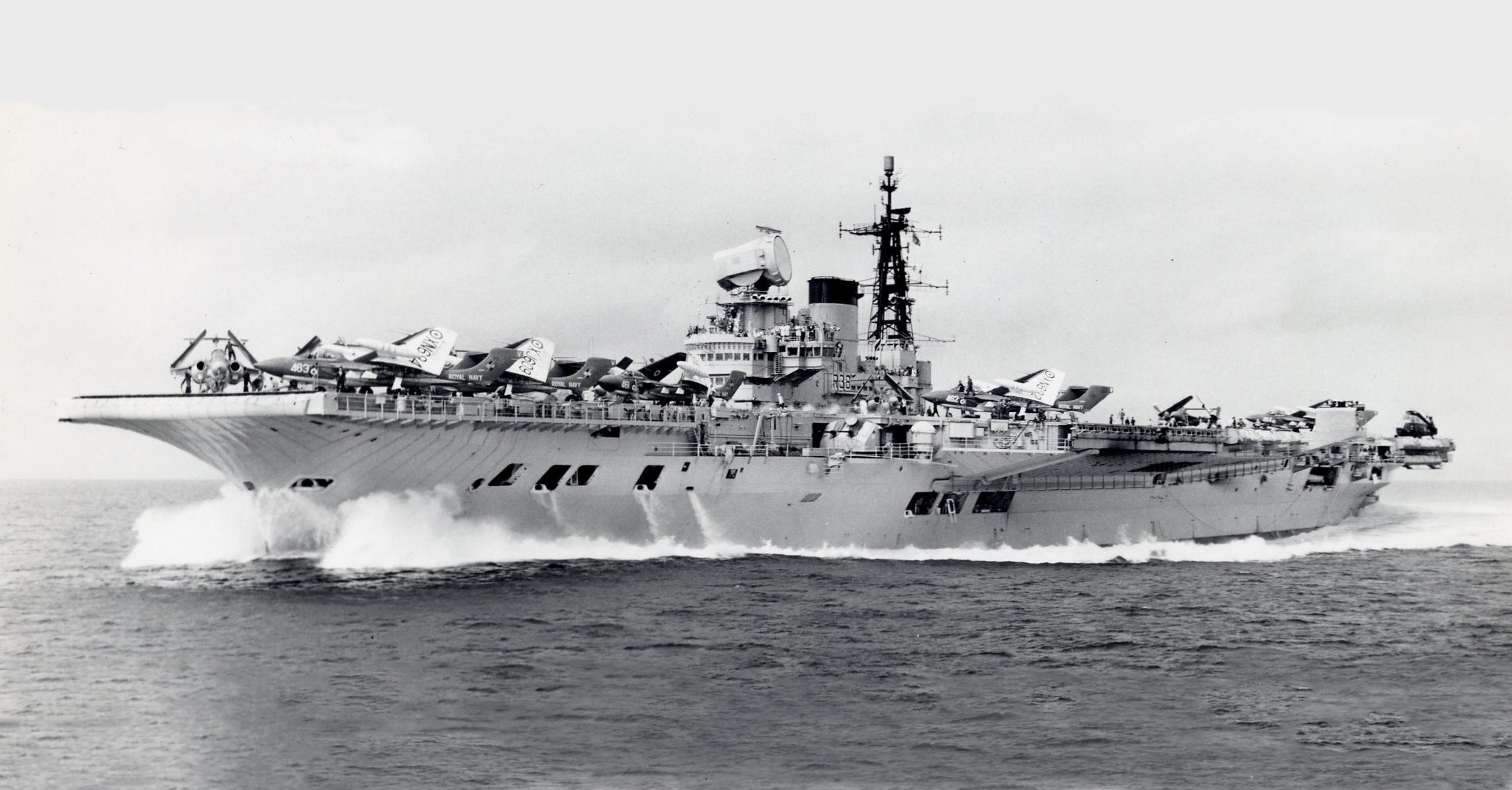
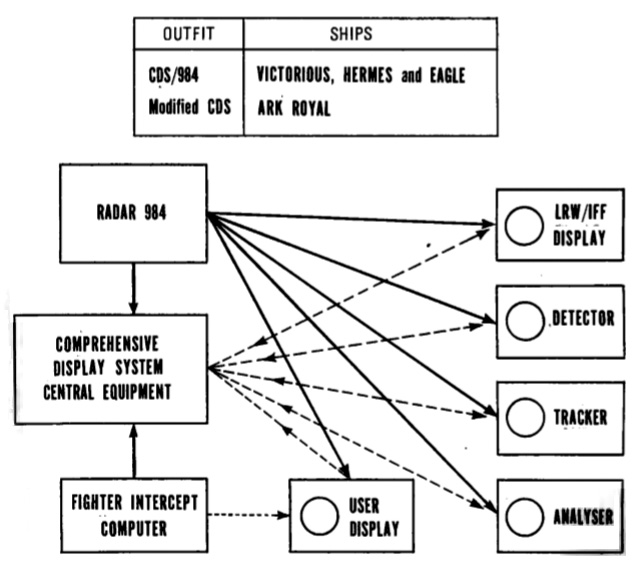
Em 1958, a RN comissionou o porta-aviões reconstruído HMS Victorious com um conceito radicalmente novo na AIO, o Comprehensive Display System (CDS). Neste sistema, a informação de rastreio de alvos aéreos obtida com um radar de alerta de longo alcance Type 984 era alimentada manualmente para armazenamento de dados analógicos eletrônicos. O avanço significativo no tratamento de dados feito pelo CDS era o acesso a dados, pois neste sistema, cada operador podia obter informações atualizadas na forma em que ele desejava, em vez de ter que selecionar informações de uma unidade central de visualização comum.
O CDS foi um sistema bem sucedido e, prestou serviço nos porta-aviões HMS Victorious e HMS Hermes, e em dois destróieres de mísseis guiados – HMS London e HMS Kent.

Action Data Automation (ADA)
Durante a década de 1950, a tecnologia informática digital fez grandes avanços e a RN rapidamente previu seu uso na AIO e controle de armas. O CDS reduziu significativamente o tempo de acesso aos dados armazenados eletronicamente, mas os dados eram processados manualmente e, devido à grande quantidade disponível, um grande número de homens era empregado nos centros de operações. As considerações de mão-de-obra muitas vezes fizeram a Marinha procurar novas ideias, já que o espaço é sempre pequeno em um navio e, em tempo de paz, a disponibilidade de homens raramente atende a demanda.
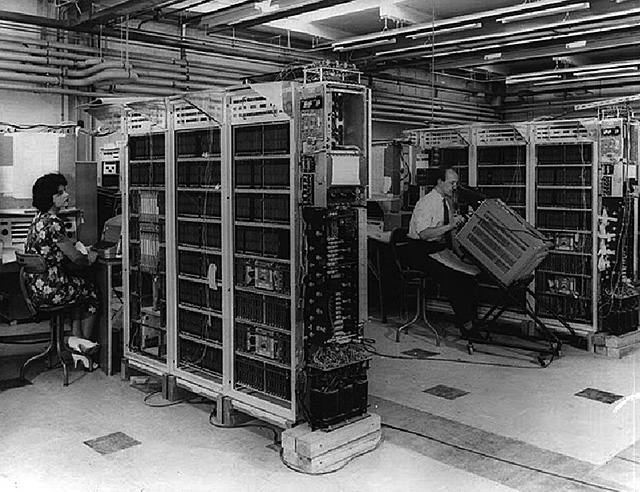
No final da década de 1950, a companhia britânica Ferranti estava desenvolvendo, em conjunto com o “Admiralty Surface Weapons Establishment” (ASWE), o computador “Poseidon”. Este era, naquela época, uma máquina extremamente rápida e poderosa, e usava lógica de transistor de germânio. Três deveriam ser usados no sistema Action Data Automation (ADA) no porta-aviões HMS Eagle, que estava sendo modernizado para transportar os últimos tipos de aeronaves, radar e armas. Outro desenvolvimento importante para este projeto foi o ADACD, um equipamento de propósito especial para o processamento automático de dados do radar 3D do HMS Eagle.
O sistema ADA foi projetado principalmente para a AIO com particular ênfase em problemas de defesa aérea.
No ADA, a capacidade de processamento e de armazenamento de computadores digitais possibilitou avanços consideráveis. A capacidade de rastreamento e dados foi grandemente aumentada e, ao mesmo tempo, os requisitos de tripulação foram reduzidos pelo uso do rastreamento automático de radar. Os dados de todas as fontes disponíveis eram coletados nas memórias dos computadores, correlacionados e disponibilizados para exibição nos consoles dos operadores sob a forma de “labelled plan displays” (LPDs).
Alguma medida de controle do sistema de armas foi tentada no ADA, mas provou-se sem êxito devido a entradas de dados insuficientemente precisas para os computadores dos sensores (radar de vigilância aérea Type 984 3D, IFF, radar de superfície, dados de radar de outros navios enviados por link digital, informações de navegação do próprio navio e entradas manuais).
Uma assistência na tomada de decisão tática pelo Comando era fornecida pelo ADA sob a forma de exibições de listas de alvos ameaçadores e armas disponíveis para engajá-los. O HMS Eagle tornou-se operacional em 1964 e o ADA, apesar de algumas reivindicações iniciais ambiciosas de sua capacidade, justificou totalmente o investimento da RN no desenvolvimento de computadores digitais para o tratamento de dados táticos. Muitas lições, não previsíveis em laboratório ou em comitê, foram aprendidas. Em particular, foram obtidas muitas dicas para o desenvolvimento futuro da interface homem/máquina.
A crença ainda grande de que um computador seria a resposta para todo o tratamento de dados e os problemas de controle de armas revelou-se um mito e o adágio popular dos operadores de computador, “If you put garbage in, you will get garbage out” (“se você introduzir lixo, você vai obter lixo”), demonstrou-se perfeitamente verdadeiro.

Action Data Automation and Weapon System – ADAWS
O próximo desenvolvimento do ADA foi abraçar o requisito de tratamento de dados de todos os três ambientes de guerra naval (ar, superfície e sub-superfície) em um sistema informático e, além disso, fornecer mais controle do sistema de armas através do processador central.
Uma série adicional de sistemas ADA foi encomendada em 1961, para instalação nos navios posteriores da classe “County” da RN e destróieres de mísseis guiados. Esses navios foram os primeiros a receber o míssil Seaslug Mk2, proporcionando melhor desempenho comparado aos tipos anteriores.
O sistema fornecia funções semelhantes de Action Information do porta-aviões HMS Eagle, incluindo instalações para detecção automática e rastreamento de alvos de superfície e aéreos. Um novo equipamento de extração automática de uso geral (SPADE) foi desenvolvido para uso com qualquer radar 2D típico e, nesses navios, este equipamento era montado em conjunto com radar de alerta aéreo de longo alcance (banda P) e com radares de banda S para designação de alvo e busca de altitude. A determinação de altitude era, de fato, controlada pelo sistema informático, obtendo medições de altura automaticamente em alvos selecionados pelos operadores ou pelo programa de computador. Esse processo acelerava a taxa de descoberta de altitude e também economizava vários operadores.
Outras funções novas também foram incluídas nesses sistemas. Entrada de dados do equipamento de Guerra Eletrônica do navio eram aceitas. Os dados de sonar eram de entrada semi-automática – ou seja, o operador de sonar continuava a detectar e medir as posições dos contatos, mas suas medições eram “lidas” automaticamente pelo computador. Auxílio para a operação antissubmarino (ASW) incluíam o cálculo de ordens de vetor (“VECTACS”) para um helicóptero ASW usando o procedimento de ataque de torpedo MATCH ASW.
No campo da defesa aérea, em vez das instalações de alocação de combate, controle e recuperação usadas em um porta-aviões, o sistema da classe “County” incluía instalações para auxiliar a seleção de alvos para o engajamento pelo armamento antiaéreo (AA) do navio – Seaslug, Seacat e canhão de 4,5 polegadas. Para as armas e os sistemas Seacat, era fornecida a indicação de alvos (Target Indication – TI) com alcance e a direção, com controle direto de sincronismo de seus respectivos diretores de tiro.
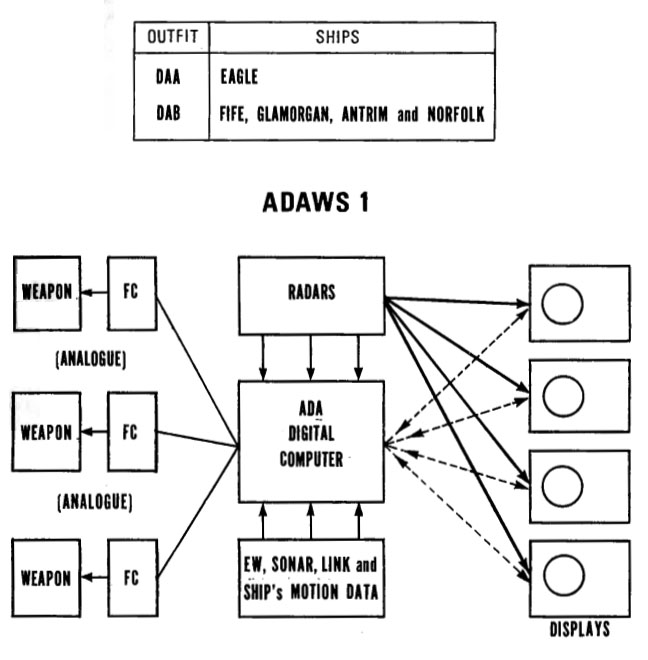
Para o míssil Seaslug, eram fornecidas certas instalações adicionais – além da indicação de alvo – para auxiliar o controle de engajamentos. Devido ao seu maior envolvimento com o controle de armas, o sistema da classe “County” recebeu o título ADA Weapon System MK1 (ADAWS 1). No entanto, deve notar que, nesses navios, todas as armas mantinham seus computadores locais separados de controle de tiro para emergências, caso o sistema principal falhasse.
O sistema ADAWS 1 usava dois computadores Poseidon da Ferranti e foi instalado pela primeira vez no HMS Fife em 1965. Os displays usados em salas de operações, como os da HMS Eagle, foram fabricados pela Pye Ltd.
ADA Weapon System MK2, 4 e 5
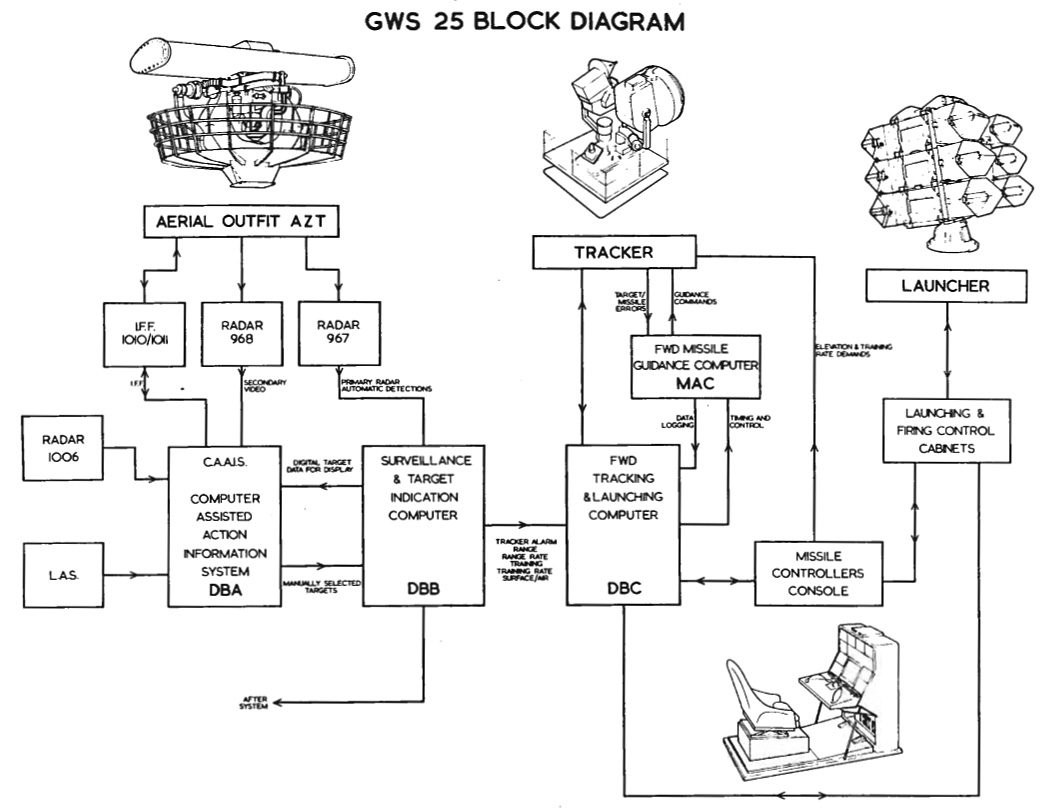
Em 1963, a Royal Navy estava envolvida no planejamento e no desenvolvimento da próxima “geração” de navios, armas e sistemas, incluindo a classe Type 82 de destróieres de mísseis guiados e o novo projeto do porta-aviões (CVA 01). Para esses navios, um novo míssil antiaéreo – Seadart – estava sendo desenvolvido, e os destróieres também levariam uma versão britânica do míssil ASW de longo alcance australiano, o Ikara. Ambos os tipos de navios também deveriam ser equipados com um novo radar 3D, desenvolvido na Holanda como um projeto conjunto anglo-holandês.
Um novo sistema de armas ADA deveria ser desenvolvido, incluindo um alargamento adicional das funções ADA.

Estas incluiriam agora um envolvimento ainda mais próximo na operação e processamento do radar 3D e um alargamento e aperfeiçoamento geral das instalações de AIO e exibição. O mais significativo de tudo, o sistema incorporaria todas as funções de controle de tiro, previamente executadas por computadores separados, para o Seadart, o Ikara e para os canhões de 4,5 polegadas.
Isso exigiu um aumento considerável na capacidade do sistema, em termos de capacidade de computador, armazenamento e capacidade de entrada/saída. Os novos sistemas foram, portanto, desenvolvidos com base em um novo tipo de computador (a série Ferranti FM1600) e de uma gama completamente nova de unidades modulares que poderiam ser usadas para formar os “tijolos de construção” para uma gama completa de sistemas.
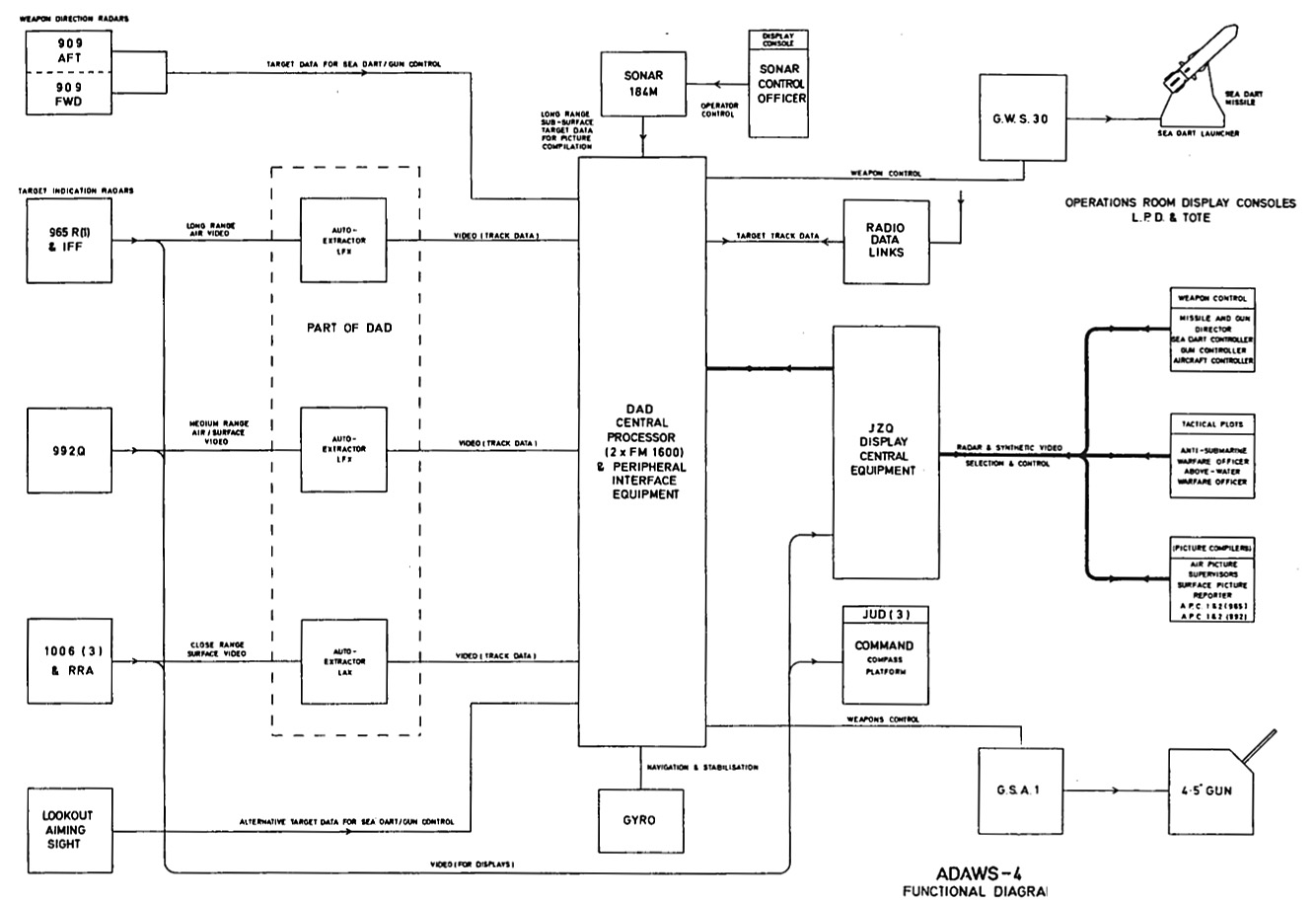
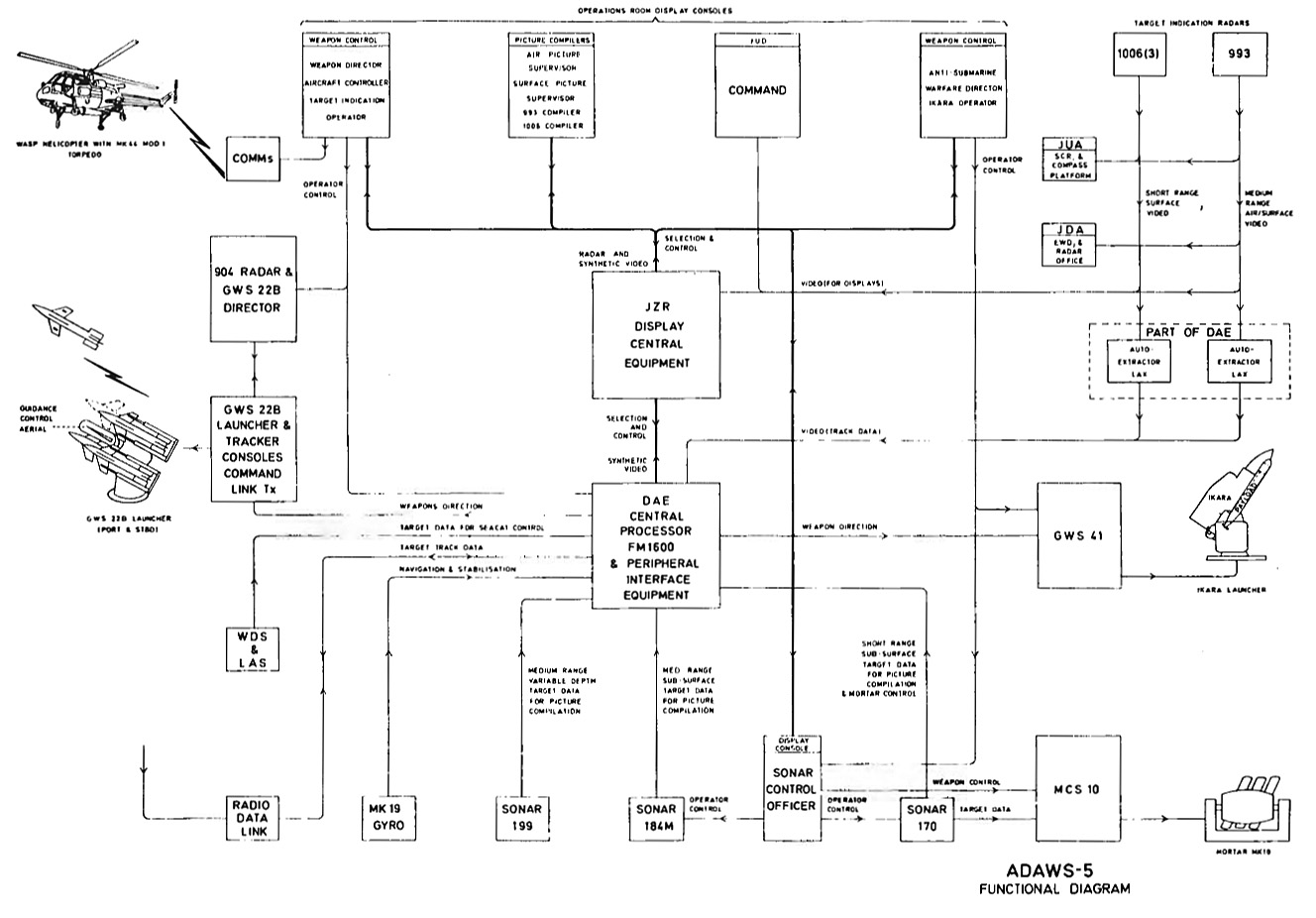
Mudanças subsequentes nos planos da Defesa britânica resultaram em cancelamento do novo porta-aviões CVA 01 e redução da classe Type 82 para um único navio — com um final correspondente à necessidade de um novo radar 3D. Em seu lugar, a RN planejava introduzir uma nova classe de navios antiaéreos menores armados com Seadart (os destróieres Type 42) e instalar o míssil antissubmarino Ikara em várias das fragatas da classe Leander existentes durante sua modernização.
O planejamento também foi continuado para uma nova classe de grandes “Cruzadores de Comando”, que seriam equipados com uma plataforma de voo para operação de helicópteros e, possivelmente, aeronaves V/STOL.

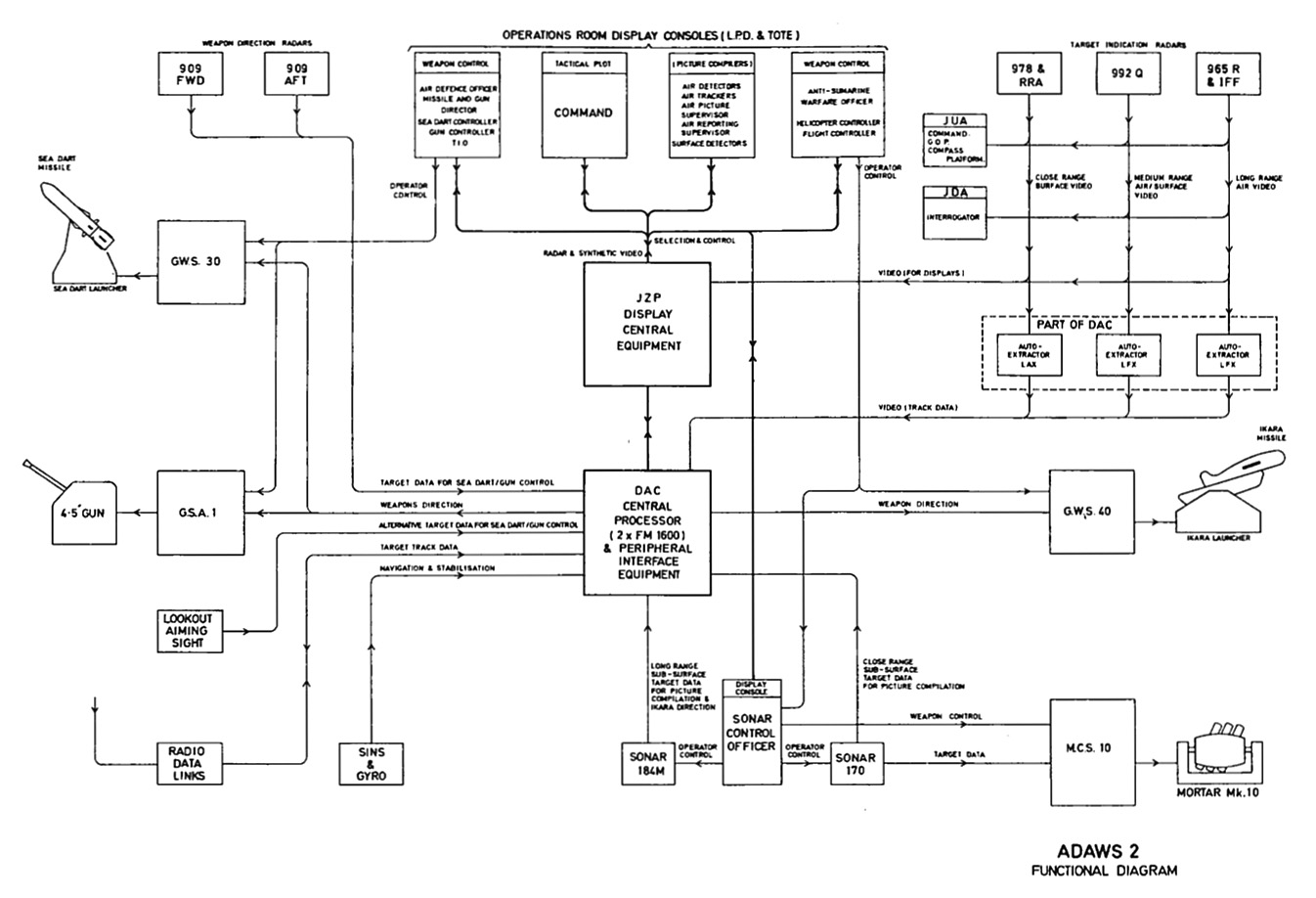
O desenvolvimento do ADAWS 2 para o HMS Bristol, portanto, continuou, com o objetivo específico de que os subconjuntos de módulos de hardware e software deste navio fossem aplicáveis para o ADAWS 4 (destróieres Type 42) e ADAWS 5 (fragatas Leander), além de fornecer a base para um sistema maior para os novos cruzadores.
O equipamento ADAWS 2 para o HMS Bristol foi instalado na primavera de 1970 e a entrega do ADAWS 4 e 5 começou em 1971.
O sistema CAAIS
Sistemas parecidos com o ADAWS foram se disseminando em navios de guerra das principais Marinhas de Guerra do mundo. Mas esses sitemas tinham a tendência de serem muito caros.
Eles foram projetados para lidar com as situações mais exigentes – particularmente a defesa aérea; eles empregavam os tipos de exibição mais recentes e sofisticados – muitas vezes com circuitos digitais de base de tempo e deflexão; eles operavam em conjunto com links de dados automáticos de alta capacidade, etc. Essas características, embora valiosas no contexto certo, tornavam os sistemas muito caros para equipar navios menores.
A análise das necessidades operacionais dos navios menores, como as fragatas antissubmarino (ASW), mostrou, no entanto, que essas unidades se beneficiariam muito com o ajuste de um sistema AIO digital e de um link de dados de média velocidade. A Royal Navy, portanto, estabeleceu determinar se um sistema viável e útil poderia ser fornecido a um preço baixo o suficiente para permitir um ajuste generalizado.
Eles também definiram as características de um link simples de dados digitais de média velocidade, para uso em sistemas menores e também em navios equipados com ADA.
O resultado das pesquisas do sistema pela RN e uma série de empresas foi a definição do CAAIS (Computer-Assisted Action Information System) – um sistema adaptado às necessidades de unidades menores.
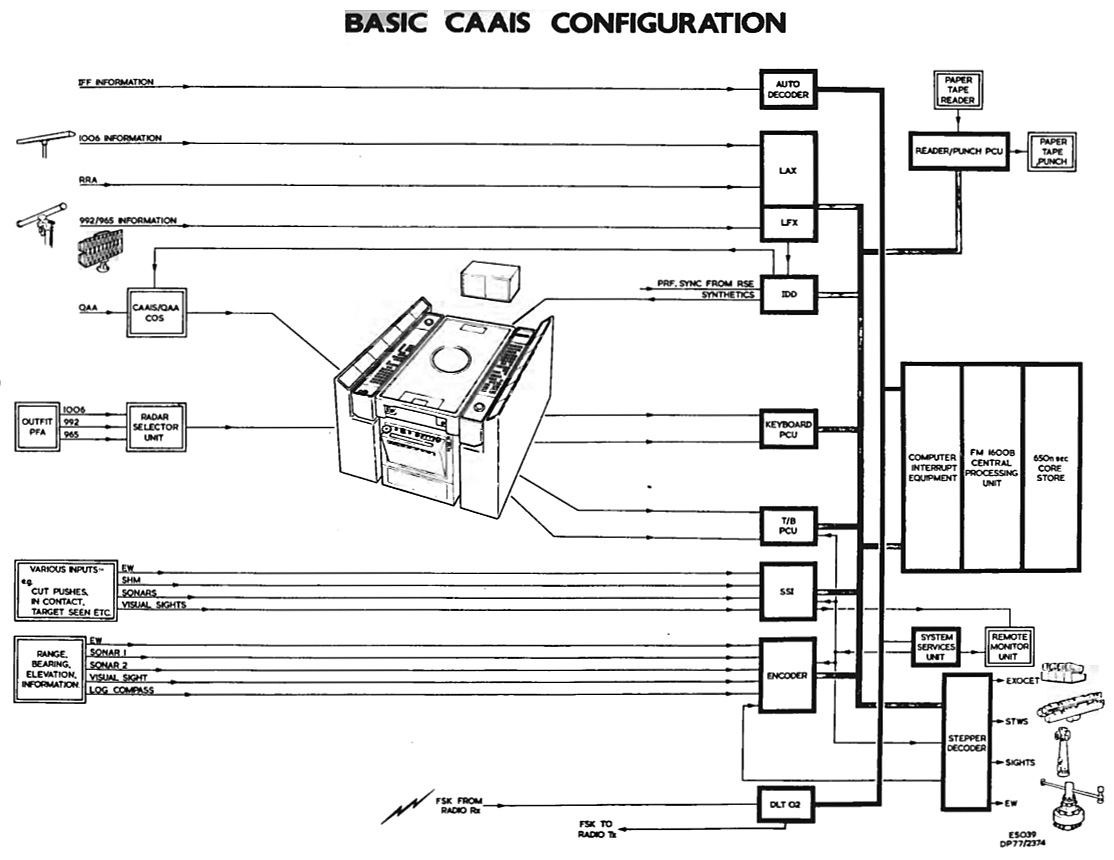
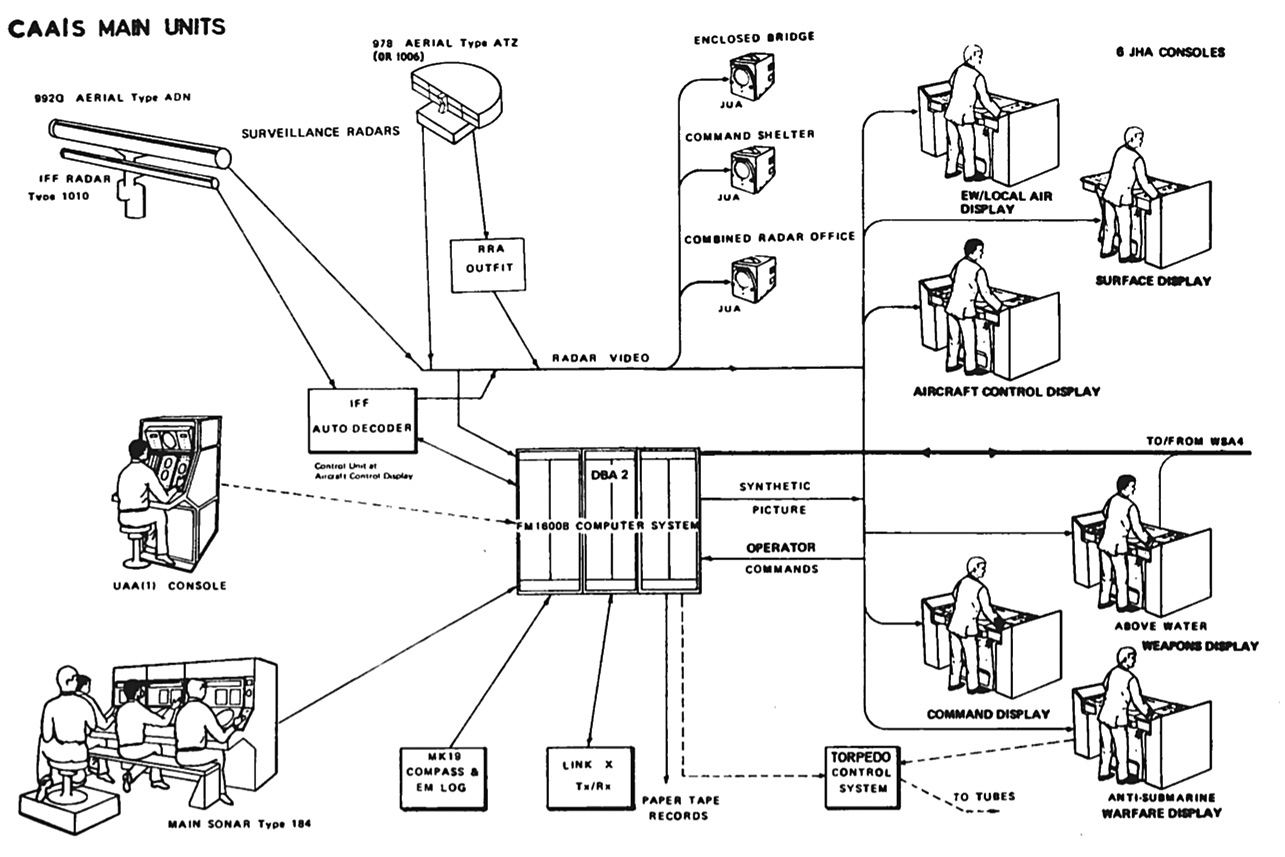
Os sistemas CAAIS e similares eram baseados no computador Ferranti FM 1600B – menor que o FM 1600 usado no ADAWS, mas totalmente compatível em características de programa e engenharia. Esses sistemas usavam o mesmo tipo de tecnologia e construção do ADAWS e, de fato, incorporavam muitos dos mesmos módulos de equipamentos digitais.
As principais diferenças entre o ADAWS e o CAAIS eram:
a. Menor capacidade de armazenamento e exibição de dados de rastreamento. Normalmente, os sistemas CAAIS previam o tratamento de até 60 alvos – amplamente suficiente para necessidades de pequenos navios.
b. Simplificação de alguns dos processos envolvidos. Em geral, o objetivo do CAAIS era auxiliar os operadores a realizar suas tarefas normais de forma mais eficiente, em vez de substituí-los completamente por procedimentos totalmente automáticos.
c. Uso de consoles de exibição que, ao aceitar padrões mais modestos para a deflexão e velocidades de entrada de caracteres, precisão de registro, etc., ofereciam uma solução extremamente econômica.
O efeito de a. e b. foi reduzir os requisitos de velocidade e armazenamento do computador: juntamente com as unidades de displays de baixo custo, todo o sistema se tornou mais econômico.
O conceito CAAIS demonstrou um alto grau de flexibilidade, fornecendo sistemas modulares para atender aos requisitos de fragatas de vários tipos e capazes de extensão para cobrir as necessidades de unidades maiores. Ele também foi previsto para ser instalado em pequenas embarcações.

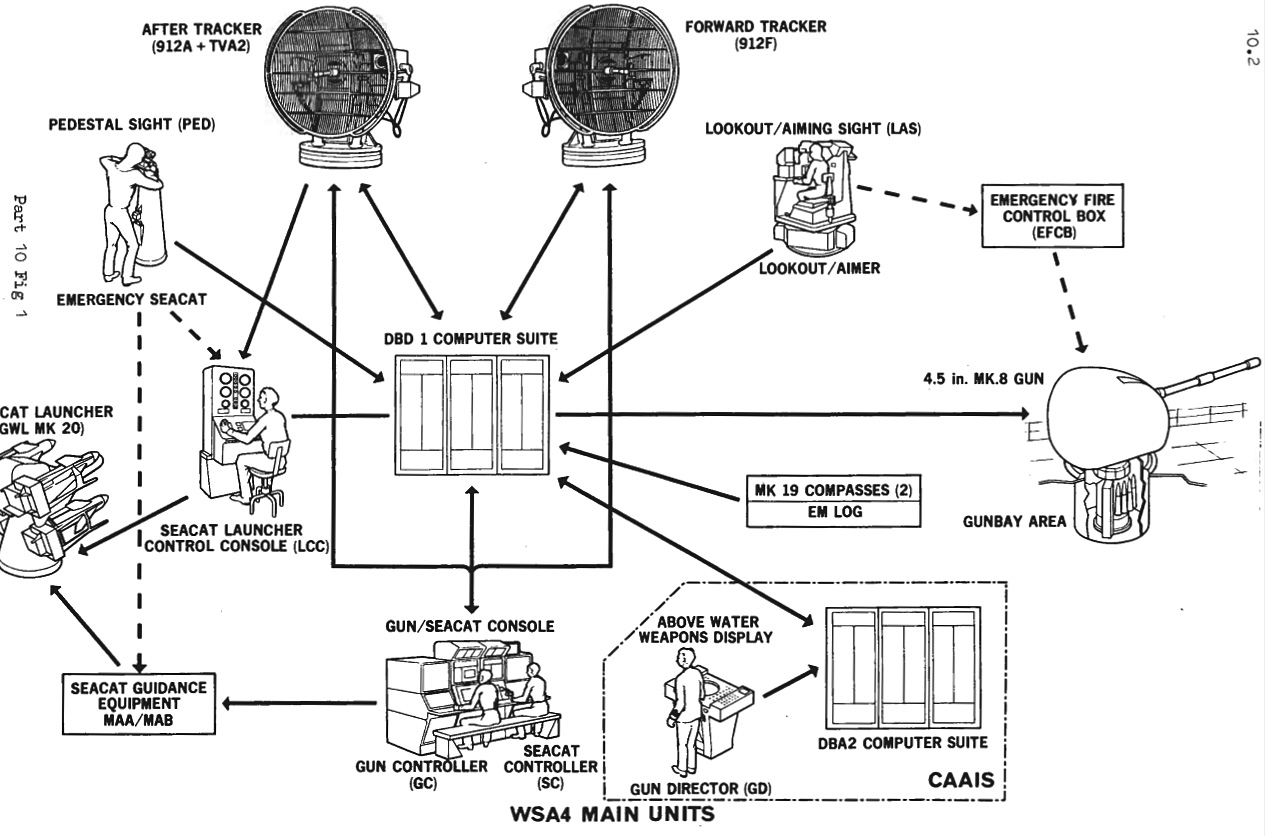
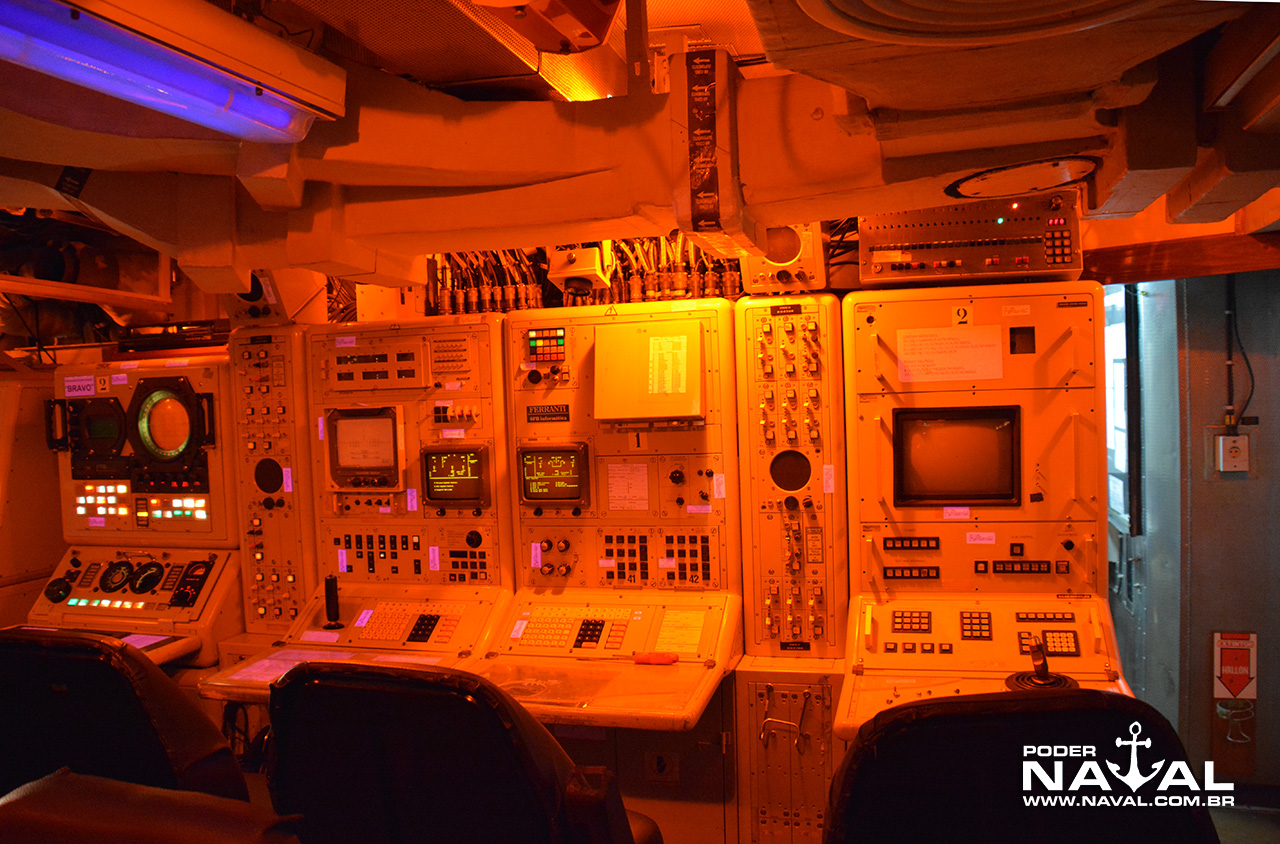
Depoimento de um operador de radar da Marinha do Brasil sobre o CAAIS 400 das fragatas classe Niterói
Em 1986, época que a informática engatinhava no Brasil, as fragatas classe Niterói era o que havia de mais moderno em termos de compilação de dados táticos e interface entre sensores e armamentos.
Nesse ano embarquei na Fragata Niterói e como operador de radar, fui designado para concorrer à escala de serviço no COC – Centro de Operações de Combate durante as viagens.
O COC era amplo, refrigerado e ali se concentravam todas as decisões durante o combate. Todos os consoles das armas acima d’água e abaixo d’água tinham lá a sua principal estação. Trabalhávamos em conjunto com passadiço, convoo, etc… interligados pelo sistema “rice” de comunicação.
Levávamos imensa vantagem sobre os colegas que estavam embarcados nos CTs (Contratorpedeiros) pois o sistema CAAIS 400, que gerava o vídeo sintético e trabalhava em conjunto com radares, sonares, MAGE (ESM) e armamentos, nos dava em tempo real a solução para os diversos cálculos.
Caso o sistema caísse, existia um equipamento chamado QAA que quando era acionado geravam retas no display e era possível fazer os cálculos básicos manualmente.
O vídeo sintético ficava “travado” no contato gerando um número octogonal de acompanhamento (track number). Através desse número podíamos informar os alvos ao armamento acionando uma tecla chamada TI (target indication) onde resultava a solução para o ataque. Era fantástico para a época.
O CAAIS também “falava” com outros navios através do link YB. Podíamos enviar e receber contatos através desse sistema. O vídeo sintético recebido aparecia no nosso display em forma de uma pequena gravata borboleta.
O CAAIS 400 recebia informações da giro e do hodômetro, portanto trabalhava com marcações verdadeiras evitando cálculo de declinação magnética.
Uma das deficiências era a não possibilidade de inserir latitude e longitude. A navegação oceânica era estimada.
A Marinha do Brasil foi a primeira Força Armada Brasileira a integrar o armamento aos sensores através da informática. — Georg Krause


A revolução dos microcomputadores
Na década de 1980/90, a introdução dos microcomputadores baseados em processadores Intel e Motorola levou à adoção de sistemas comerciais distribuídos, não mais centrados em poucos mainframes ou minicomputadores de projeto dedicado.
Os sistemas ficaram mais baratos e menos vulneráveis a avarias, já que cada console ou estação de trabalho passou a contar com seu próprio processador e sistema operacional.
Sistemas mais recentes, como o SSCS – Surface Ship Command System das fragatas Type 23 e destróieres Type 45, empregam processadores x86 e rodam em uma versão do sistema Unix.


FONTES: Museum of Radar and Communications / Center of Computing History
VEJA NA TERCEIRA PARTE DA SÉRIE: O desenvolvimento dos sistemas NTDS e Aegis da Marinha dos EUA



A evolução do CAAIS 400 para o 450 foi enorme… os displays passaram a ser verticais… a interação com o computador ficou mais simples (no 400, era preciso decorar os comandos para obter as informações)… não havia mais a necessidade de operador norte e sul… e o sintético não ficava piscando… o carregamento dos programas ficou mais rápido… enfim, o sistema como um todo ficou mais amigável para um operador e mantenedor recém embarcados… boas lembranças de que foi da Divisão Sierra por quase 6 anos…
excelente materia………….
Tá mto boa a reportagem.
No tópico “o sistema caais”, não entendi o trecho “muitas vezes com circuitos digitais de base de tempo e deflexão”
Parabéns, Galante. Quem já pesquisou e escreveu matérias complexas como essa, ao ver o resultado final, sabe as horas de trabalho que isso tudo requer. Ótima pesquisa e seleção de fotos!
Ps – complementando: não só horas, mas dias.
Parabéns!!
Fantástico…
Será que algum sistema usa SO baseado no Microsoft Windows??
Já pensou! Tela azul….meu Deus….logo agora!?
Kkkk
Tão importante quanto comunicar e prontificar os dados para a tomada de decisão, nos dias de hj, impedir um ataque cibernético nestes sistemas é algo fundamental não?
Uma duvida sobre o tempo de resposta anti missil. Para sub sonico sea skimmer em torno de 12 segundos com mar calmo. E no caso do missil antinavio super ou hipersonico? Ha tempo suficiente para defender se com os sensores do proprio navio ou tem q fazer uso de plataforma aerea? E do outro lado ha tempo para os sensores do missil fazerem a correcao no final da trajetoria na fase de busca ativa?
Obrigado.
Marco.
Muito boa a matéria. Uma boa linha do tempo da evolução dos sensores para as determinadas missões.
Excelente materia!!! Parabens Galante!!! . Uma questão que tenha apresentado dentro do contexto e conceito de guerra de redes seria a possibilidade de um COC de um navio ativar e sensibilizar sistemas de armas embarcados em outro navio nas proximidades. . A materia acima, faz menção aos links de comunicação entre navios, mas parece ser apenas para controle situacional ( o que já é muito). . Pergunta, o quanto estes links são discretos ao monitoramento pelo adversário? ele pode ser captado pelos sensores do adversário? Tal qual a antiga necessidade de silencio radio, isto ainda é um problema nos dias… Read more »
Carvalho, os links, seja YB, BR1, BR2, ou qualquer outro, são enlaces radio comuns, porém criptografados. São passíveis de interceptação e, inclusive, contramedidas. Sua utilização quebra o silêncio eletrônico do emissor.
Podem ser utilizados por meio da “amarração” em diversas faixas de frequência, mas normalmente ficam no UHF, para mantê-los no horizonte.
Teoricamente poderiam ser utilizados canais como o laser, mas que, smj, apresentarão desafios na manutenção do link, por serem extremamente direcionais e necessitarem das antenas trecadas umas as outras.
Perfeito Mestre Vagner! Pelo que já havia visto, era o consenso que formatei aqui comigo mesmo… . No entanto, me questiono o porque desta tecnologia , a qual hoje em dia é plenamente comercial não tenha muitos modelos de prototipo conceito para o ambiente de guerra naval. . Parece que o desestimulo encontra-se nos modelos de guerra ainda reinantes. Por exemplo, dificil imaginar um meio de superficie que não vá irradiar radar e sendo assim e pela própria natureza deixar de assinalar sua propria posição. . Mas hoje em dia, muitos sistemas de combate poderiam estar embarcados de cascos de… Read more »
Marco, a resposta a essas ameaças depende de vários fatores… atenção e adestramento dos operadores, sintonia do radar, condições ambientais…
Já fiz um exercício com He voando a 50ft, simulando míssil… pela distância que nós detectamos, levando-se em consideração a veloc de um MM40, daria para reagir… no limite…
Existe um recurso chamado Emerg Target Indication (não lembro ao certo a denominação) que aponta todos os armamentos e sensores DT para aquela ameaça… agiliza bastante… mas aquele exercício foi uma situação específica… embora não soubessemos o eixo da ameaça, sabíamos que viria… foi válido, no entanto… abraço…
XO, muito obrigado!
E que muito se diz sobre a incapacidade do homem reagir a tempo a essa ameaca. A solucao seria uma resposta automatica, vc sabe a que estou me referindo, dai estar perguntando sobre isso na materia supra sobre o COC. Provavelmente a informacao e classoficada mas acho que nao ha muito otimismo quanto a isso. Ou bem abate-se a plataforma lancadora ou tem-se q confiar na defesa de ponto q num ambiente saturado de varias ameacas em eixos diversos…
Mais uma vez obrigado!
Marco, realmente, neutralizar a plataforma lançadora seria a melhor opção… na impossibilidade disso, a defesa em profundidade fica como uma medida adequada… abraço…
Que evolução magnífica, e que conteúdo incrível, parabéns aos editores.
Saudações amigos do blog,
Mais uma matéria fabulosa!!!
Fui caçador de submarino na fragata Niterói…
Boa matéria. Servi durante 3 anos na F-44 ( FINDEP), antes da modernização, Divisão Sierra.Muitas lembranças, várias histórias.
Sistema “rice” de comunicação. Teclas a “meio”.